
智能科技有限公司
清空记录
历史记录
取消
清空记录
历史记录
服务热线:13770335112
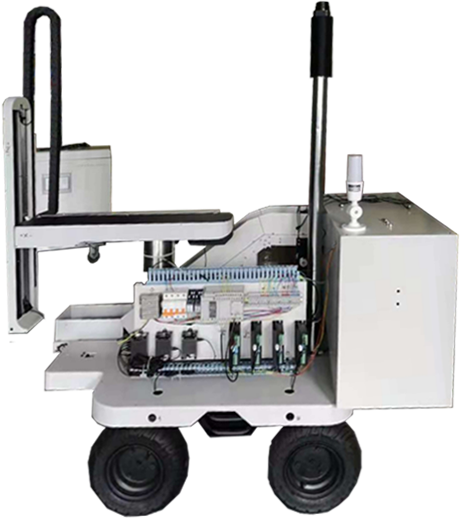
多功能采摘机器人

大型杂草清除机器人

小型杂草清除机器人
Product Center
产品中心







专注于提供机器视觉、智能制造等技术服务及解决方案
南京金沙乐娱总区智能科技有限公司成立于2017年,是专注于提供机器视觉检测设备定制、智能制造等技术服务及解决方案的企业。
经过几年的发展,公司已培养出一批业务娴熟、技术精的技术骨干和响应迅速、经验丰富的精英团队。目前公司重点项目涵盖了多种功能采摘移动平台、云交互式食品智能制造设备、植物表型分析仪、智能草坪养护机器人、图书分拣机器人、图书上下架机器人、智能垃圾桶、产线可靠机器人、特种环境作业机器人及控制系统等原生研发项目。公司先后为南京农业大学、南京理工大学、赛多利斯(上海)贸易有限公司、中材科技股份有限公司、中材工程股份有限公司等客户提供了质优服务,目前已获得计算机软件著作权13项,实用新型荣誉6项。
Video Center
短视频中心
Application case
案例展示



News Center
新闻中心



Cooperative Partner
合作伙伴
关注我们

版权所有©2021 南京金沙乐娱总区智能科技有限公司
南京采摘机器人厂家-智能草坪养护机器人-机器视觉检测设备定制-南京金沙乐娱总区智能科技有限公司

选择区号